
在现有机器人、机器狗或跟随小车上安装小型UWB PDOA测向测距基站,无需大改机体结构,即可获得目标方向、距离和识别信息。2个基站覆盖前后,4个基站覆盖360°,跟随测距不小于30米,并支持多机同场。
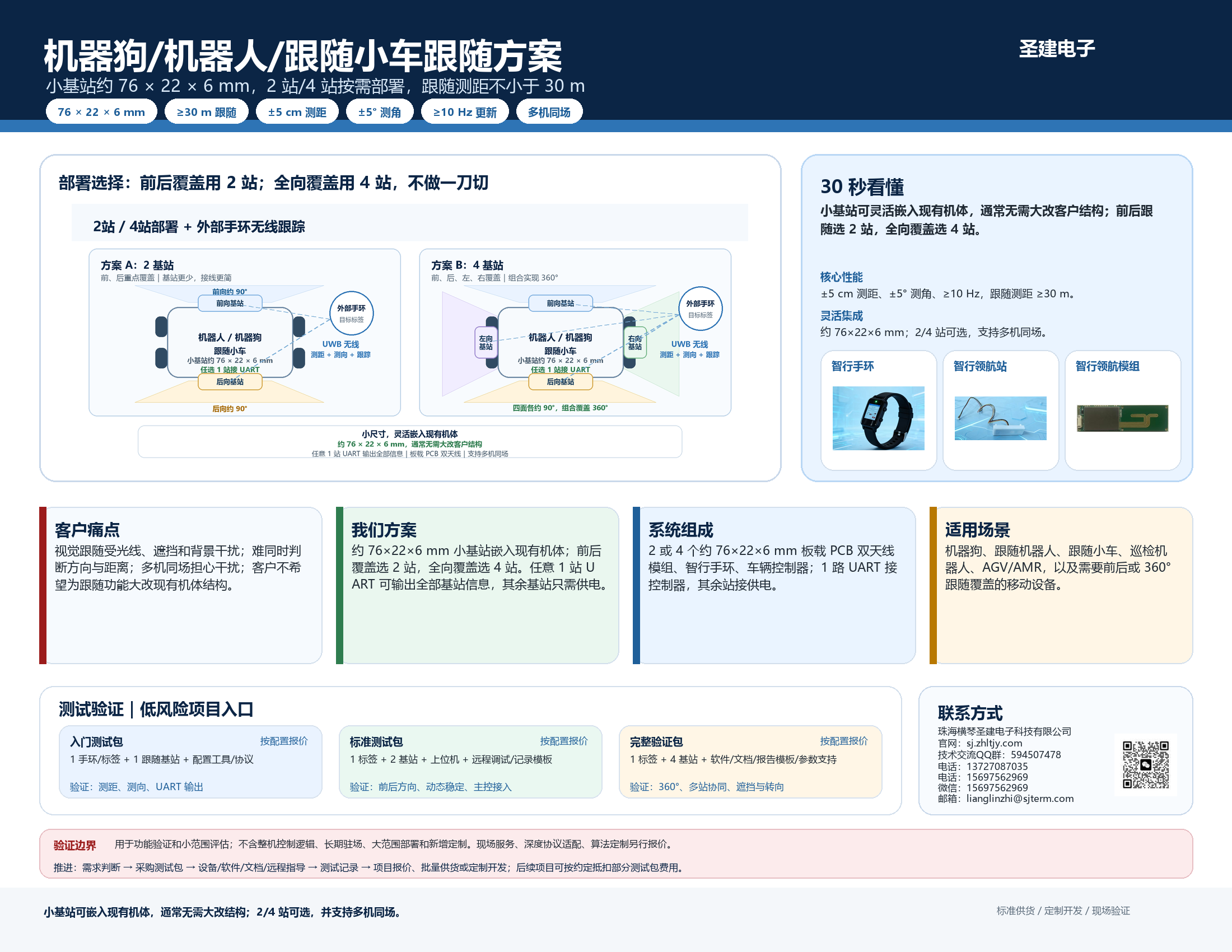
视觉跟随容易受光线、遮挡和背景干扰;现有机器人需要同时获得方向与距离;客户不希望改变现有机体结构;多台设备同场时还需要区分目标。
小基站采用PCB天线,体积紧凑、抗震动,便于嵌入现有机体。手环或标签与基站通过无线完成测距、测向和跟踪,基站再通过UART向机器人主控、上位机或控制器输出数据。
2基站:覆盖前后方向,适合不要求360°覆盖的设备。
4基站:每个基站覆盖约90°,组合实现360°覆盖。任意1个基站串口可输出全部信息,其余3个基站只需供电。
典型测距精度±5 cm、测角精度±5°、刷新率≥10 Hz、跟随测距≥30 m;支持多基站和多机同场。实际指标与安装方式、遮挡及现场环境有关。
2或4个跟随小基站 + 1个手环/标签 + 配置工具 + 串口协议说明 + 接线说明 + 基础远程指导 + 测试记录模板。
测试验证用于确认测距、测向、串口输出、动态跟随和主控接入可行性;机器人整机控制逻辑、运动算法及新增定制功能另行评估。
请提供机器人外形尺寸、安装位置、供电与串口接口、目标距离、覆盖方向及多机数量。